My Libraries Assignment using a Servo and Joystick
This is the GIF of my working servo and joystick circuit. So magnificent.
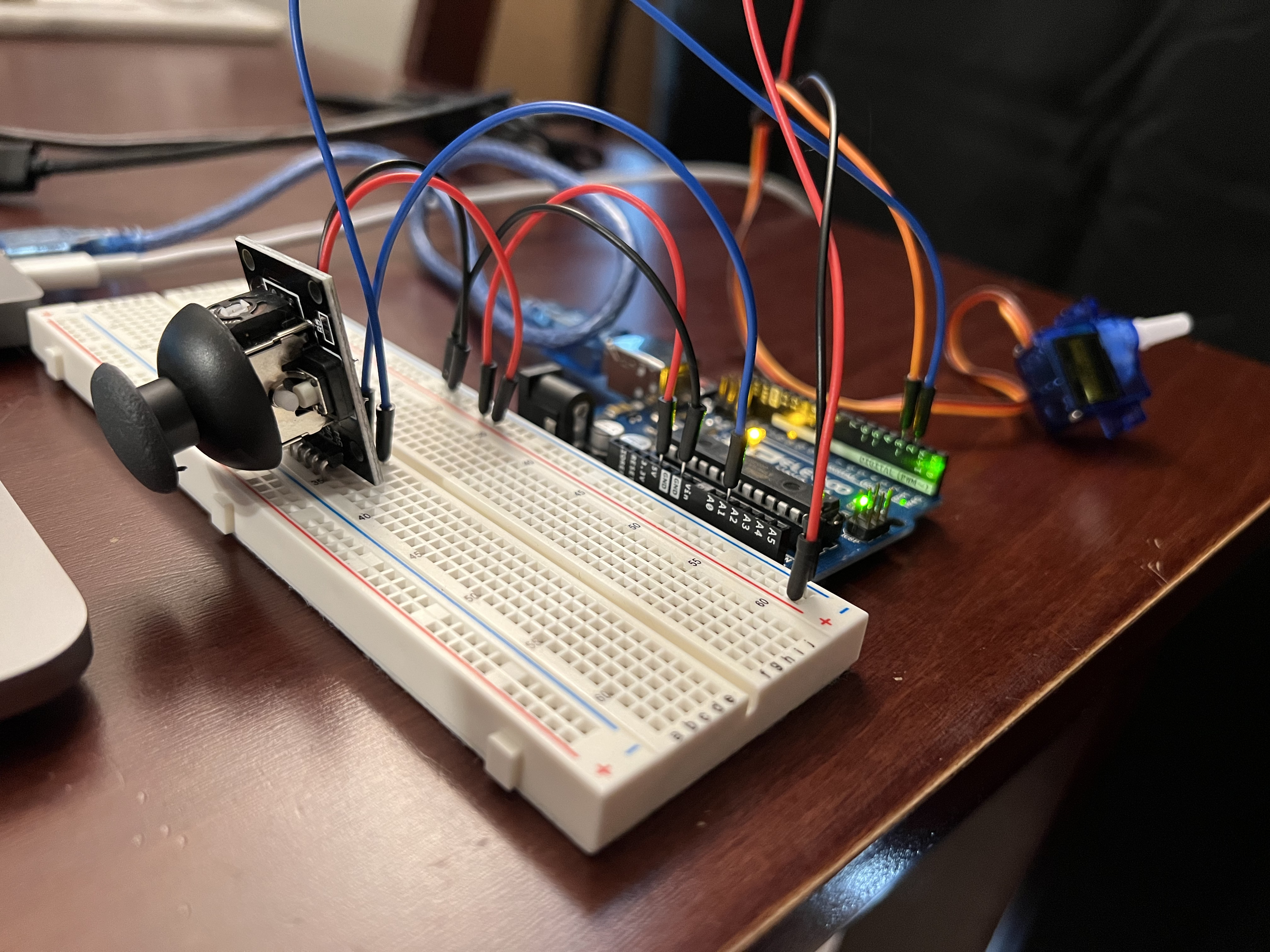
This is a picture of my circuit. Because the joystick has a resistor built into it, I did not need to use an external resistor, the servo also did not require one.
#include <Servo.h>
Servo myServo; // create a servo object
int x = A1; // setting a variable to represent analog input pin A1
int xval = 0; // setting joystick xval counter
void setup() {
myServo.attach(3); // attaches the servo on pin 3 to the servo object
}
void loop() {
xval = analogRead(x); // reads the x value of joystick
xval = map(xval, 0, 1023, 1, 179); // x value of joystick is mapped to the angle of rotation of the servo
myServo.write(xval); // mapped values are written to pin 3 that sends the values information to the servo
// wait for the servo to get there
delay(15);
}
Here is a snippet of my code. All of my important lines of code are commented. The values from the x input of the joystick ranged from 0 to 1023 according to the serial monitor, so that is what I chose to use as my input low and high values, respectively. As for the servo, the servo can only be programmed between 0 and 180 degrees which is why it is bound as such in my code. I only mapped the servo to the x value of the joystick as both the x and y input values for the joystick give the same value, it just changes based on the direction of the joystick being interacted with.
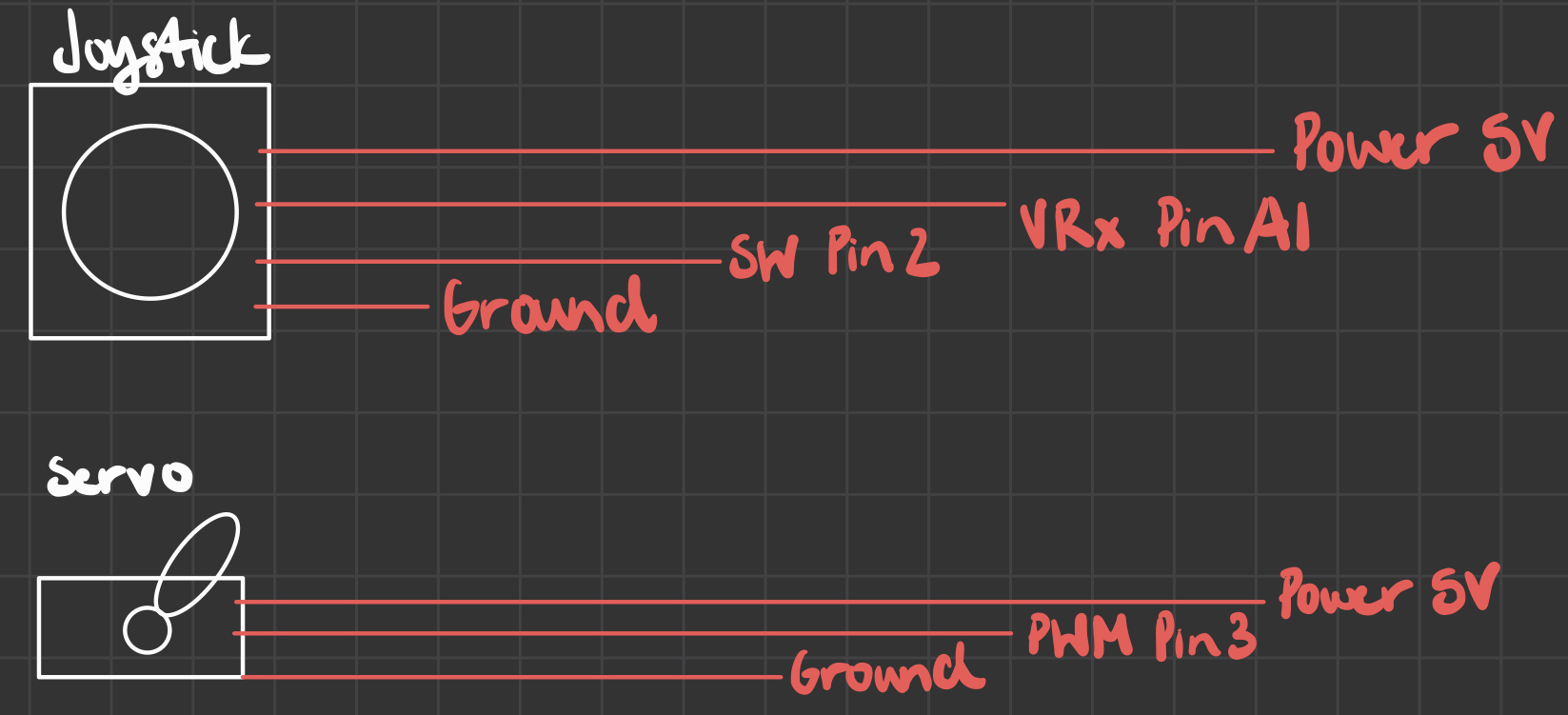
Here is the schematic that I drew up for my joystick and servo circuit. No calculations were required.